Office of Naval Research
Sea Grant College Program
National Ocean and Atmospheric Administration
National Science Foundation
Objectives
High resolution, 3-d mapping of oceanographic phenomenae for:
Verification of hypotheses and mathematical/numerical models.
Environmental monitoring
Environmental mapping
Tactical Oceanography
Mine Countermeasures
Background
The verification of oceanographic hypotheses involves measurement of
spatial and temporal gradients, requiring high
spatial and temporal resolution.
Traditional oceanographic measurement approaches are limited in terms
of coverage and resolution:
Towed sensors: Coverage limited by ship mobility.
Resolution limited by navigation. Temporal and spatial samplings are
not uncoupled
Lagrangean Floats: Passively follow flow field.
Temporal and spatial sampling are not uncoupled.
Satelite imagery: Provides only surface
measurements. Excellent
coverage in surface plane, but resolution in general insufficient for
gradient measurements.
Acoustic tomography: Provides excellent coverage in
vertical slices. Resolution dependent on number of acoustic paths
through region, insufficient for gradient estimates.
Autonomous Underwater Vehicles (AUV): High
resolution in space and time. Excellent synoptic coverage, but time
and space gradient measurements are coupled, i.e. do not provide
``snap shots'' of oceanographic parameters.
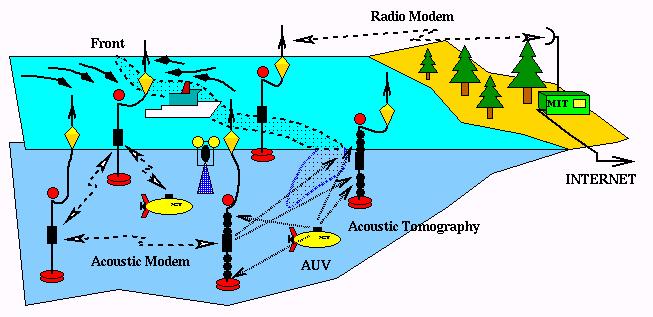
Solution
Hybrid Adaptive Sampling Network Concept:
Tomography: provides mapping coverage, and high-resolution navigation for AUV-s.
AUV network: provides rapid response and direct, high-resolution
measurements of oceanographic parameters
Integrated AUV navigation and acoustic tomography
Adaptively improves tomography resolution by having
mobile tomography sources.
Improves tomography coverage by adaptive mobility of sources.
Higher resolution of sensor navigation by simultaneously
estimating oceanography.
Tomography provides coverage in terms of spatial ``snap
shots'' of oceanographic parameters.
Local Area Network (LAN) Architecture.
Integration with acoustic communication network
technology provides standard Internet architecture for
sampling network, including AUV-s.
AUV sampling strategies optimizing resolution may be
designed.
Flexible Deployment
Network ultimately deployable from airplanes or ships
anywhere in the world.
Deep/shallow water.
Standard NFS (Network Filing System) protocol for data
telemetry to and from remote control center.
Flexible communication requirements (Satelite, WLAN (Wireless
Local Area Network), Fiber optics).
Benefits
Rapid deployment in oceanographic active areas
Deployment flexibility.
Shallow/deep water.
Improves resolution of oceanographic measurements by orders of
magnitude.
Optimal sampling strategies by focusing on high gradient regions.
Low cost. Autonomous/remotely operated once deployed. No ships
needed once deployed.
Deployment Schedule
May 1995: Bermuda. Deep water AUV test
June 1995: Juan de Fuca. Deep water, rapid response.
Fall 1995: Buzzard's Bay. Navigation-communication
network test.
April 1996: Buzzard's Bay. Test deployment of Haro Strait AOSN
June 1996: Haro Strait, BC Real-time mapping of frontal dynamics.
Summer 1996: Bermuda. Deep water, communication-navigation, rapid response.
Winter 1997: Labrador Sea. Deep water. Rapid response to satellite detected convective overturning. Real-time, remote data collection and control.